1. RNN的前向传播原理
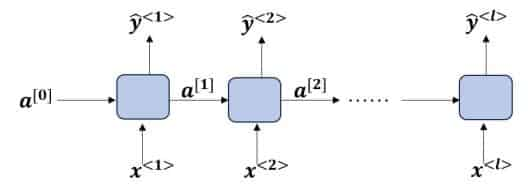
以一个Many-to-Many的简单RNN为例(输入输出维度相等):

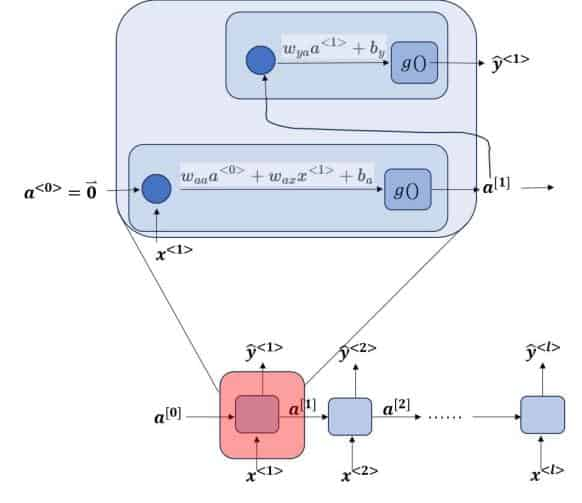
每一时间单位的前向计算过程为:
a<t>=f(waaa<t−1>+waxx<t>+ba)z<t>=wyaa<t>+byy^<t>=g(z<t>)
第一步也可以简写为:
a<t>=f(wa[a<t−1>,x<t>]T+ba)
wya也记作wy.
有的RNN论文中还会把第一步的激活函数放到里面,即写作:
a<t>=waaf(a<t−1>)+waxx<t>+ba
这两个公式在宏观意义上被认为是等价的。
2. RNN的损失函数与反向传播(Back Propagation Through Time, BPTT)
现在,通过上一步已经能够找到预测值y^<t>,在真实值y<t>已知的条件下,单步的损失可以借助交叉熵定义为:(当然也可以用残差定义)
L<t>(y^<t>,y<t>)=−y<t>logy^<t>−(1−y<t>)log(1−y^<t>)
模型总的损失函数为:(取时间平均,某些论文也没有做时间平均,个人感觉时间平均没有太大的必要)
L(y^,y)=T1t=1∑TyL<t>(y^<t>,y<t>)
优化目标为:
J=wa,wy,ba,byargminL(y^,y)
分析可知,优化的目标函数与四个参量有关:wa,wy,ba,by。因此,计算损失函数相对于这四者的偏导数,不断进行参数更新,直到模型收敛,就是求解BRTT的大致过程。
为便于分析,不考虑偏置项对模型收敛的影响,只考虑权重矩阵。首先分析∂wy∂L: wy是一个与输出的预测值y^<t>相关的值,因此根据链式法则有:
∂wy∂L=∂g(z<t>)∂L∂wy∂g(z<t>)
分两项考虑,第一项:
∂g(z<t>)∂L=T1t=1∑Ty∂g(z<t>)∂L
第二项:
∂wy∂g(z<t>)=∂wy∂[g(wya<t>+by)]
其次分析∂wa∂L:
∂wa∂L=T1t=1∑Ty∂wa∂L<t>(y^<t>,y<t>)=T1t=1∑Ty∂y^<t>∂L<t>(y^<t>,y<t>)∂a<t>∂y^<t>wa∂a<t>=T1t=1∑Ty∂g(wya<t>+by)∂L<t>(y^<t>,y<t>)∂a<t>∂g(wya<t>+by)wa∂a<t>
在上式中,第一项和第二项不需要循环计算,而第三项是需要不断地计算每一步参数wa对a<t>的影响。
wa∂a<t>=∂wa∂f(wa[a<t−1>,x<t>]T+ba)+∂a<t−1>∂f(wa[a<t−1>,x<t>]T+ba)∂wa∂a<t−1>
观察上面的递归式,不难发现有以下的结构规律,对于a<0>=0,设a<i>,b<i>,c<i>为一个序列:
a<1>=b<1>+c<1>a<0>=b<1>a<2>=b<2>+c<2>a<1>=b<2>+b<1>c<2>a<3>=b<3>+c<3>a<2>=b<3>+b<2>c<3>+b<1>c<2>c<3>…a<t>=b<t>+i=1∑t−1(j=i+1∏tc<j>)b<i>
下面把a<i>,b<i>,c<i>分别替换成wa∂a<t>,∂wa∂f(wa[a<t−1>,x<t>]T+ba),∂a<t−1>∂f(wa[a<t−1>,x<t>]T+ba)
最终算式为
a<t>∂wa∂a<t>=b<t>+i=1∑t−1(j=i+1∏tc<j>)b<i>=∂wa∂f(wa[a<t−1>,x<t>]T+ba)+i=1∑t−1(j=i+1∏t∂a<j−1>∂f(wa[a<j−1>,x<j>]T+ba))∂wa∂f(wa[a<i−1>,x<i>]T+ba)
3. RNN的时序记忆能力短的原因?
为便于分析,假设隐藏层的激活函数为线性激活函数(也可以说没有激活),将RNN的前馈输出展开:
a<t>=waaa<t−1>+waxx<t>+ba=waa[(waaa<t−2>+waxx<t−1>+ba)]+waxx<t>+ba=waa waaa<t−2>+waa waxx<t−1>+waa ba)]+waxx<t>+ba=...
不难看出,每一次的前向传播都会对之前的激活值产生影响,一旦序列较长,模型对于附近的值的敏感程度就明显高于之前的输入,RNN表现出了“遗忘”的现象。
4. RNN的梯度爆炸与梯度消失成因?
假定我们使足够简单的线性激活函数作为隐藏层的激活函数f(),(或者说不适用任何激活函数) 根本原因在求解∂wa∂a<t>时,出现了:
==(j=i+1∏t∂a<j−1>∂f(wa[a<j−1>,x<j>]T+ba))(j=i+1∏t∂a<j−1>∂[waaa<j−1>+waxx<j>+ba])(waa)lwhere: l=t−j
即∂a<j>∂a<t>=(waa)l
假定 waa 可对角化,令waa的n个特征值为{λ1,λ2,...,λn}, 且满足∣λ1∣≥∣λ2∣≥...≥∣λn∥。其对应的特征向量为q1,q2,...,qn,他们组成向量基。则在这个向量空间下:
∂a<t>∂y^<t>=i=1∑nciqiT
且有(待求证?):
qiT(waaT)l=λilqiT
如果有j满足 cj=0,∀j′<j,cj=0
∂a<t>∂y^<t>∂a<j>∂a<t>=cjλjlqjT+λjli=j+1∑nciλjlλilqiT≈cjλjlqjT
因为∣λjλi∣<1,(i>j), liml→∞∣λjλi∣l=0. 由此我们可以看出,∂a<j>∂a<t>随着l的增大而指数级增大,且是沿着qj的方向增长。
虽然上面的证明waa可以对角化,但是如果用Jordan正则表达式,上面的证明可以扩展到不仅仅是最大特征值的特征向量,而且可以考虑共享相同最大特征值的特征向量所跨越的整个子空间,扩展到更广泛的情况。(这一步尚且还没有读懂 (恶补矩阵论去了) )
于是我们能够得出梯度爆炸或梯度消失的充分条件:
梯度爆炸的充分条件:$t \to \infty $ 时,λ1(waa 的所有特征值中最大的)>1。
梯度消失的充分条件:$t \to \infty $ 时,λ1(waa 的所有特征值中最大的)<1。
以上讨论的都是基于激活函数是线性的(即没有使用任何激活函数)。如果是针对非线性函数,则有非线性函数的输出一定有界这一特性,即:
∣∣diag(f(x<t>))∣∣≤γ(γ∈ℜ)
证明:只要λ1<γ1, 其中λ1是权重矩阵waa中的最大特征值,就足以发生梯度消失问题
∀k,∣∣∂a<k>∂a<k+1>∣∣2≤∣∣waaT∣∣ ∣∣diag(f′(x<k>))∣∣<γ1γ=1
于是∃η∈ℜ,满足∀k,∣∣∂a<k>∂a<k+1>∣∣2≤η<1
∂x<t>∂y<t>^(i=k∏t−1∂a<i>∂a<i+1>)≤ηt−k∂a<t>∂y<t>^
因为η<1, 根据上式,模型非常深的时候(t−k很大),梯度指数下降至0值附近。
根据梯度消失的证明思路,我们也很容易得到梯度爆炸的条件:λ1<γ1
从微分方程到RNN
令s(t)是d-维状态,考虑一个一般的非线性一阶非均质常微分方程,描述状态信号随时间的变化。(这很像状态估计问题)
dtds(t)=f(t)+ϕ
状态随时间变化可以认为有两部分在作用,其中前者与输入x(t)(或者引用状态估计问题中的说法:观测)有关:
f(t)=h(s(t),x(t))
于是,一个在物理、化学、工程领域非常常见的方程式就出现了:(至少原作者Sherstinsky是这么说的)
dtds(t)=h(s(t),x(t))+ϕ
除此之外,f(t)还有其他形式,比如脑动力学研究中的加性模型(Addictive Model):
f(t)=a(t)+b(t)+c(t)
加性模型的三个时间向量如下定义:
a(t)b(t)r(t−τr(k))c(t)=k=0∑Ks−1ak(s(t−τs(k)))=k=0∑Kr−1bk(r(t−τr(k)))=G(s(t−τr(k)))=k=0∑Kx−1ck(x(t−τx(k)))
式中,r(t)是状态s(t)的变换,G()为非线性激活函数。状态随时间的变化就可以展开写成如下形式:
dtds(t)r(t−τr(k))=k=0∑Ks−1ak(s(t−τs(k)))+k=0∑Kr−1bk(r(t−τr(k)))+k=0∑Kx−1ck(x(t−τx(k)))+ϕ=G(s(t−τr(k)))
该方程是一个具有离散延迟的非线性常延迟微分方程 (DDE)。首项是
5. LSTM的前向传播
在LSTM(以及GRU)中,我们要引入一个新概念:候选记忆元(candidate memory cell),用c表示,在每一个步长里,用候选值c~<t>重写之前记忆的值c。(这里的c和传统RNN中的隐藏层激活值a从本质上来说是同一个表达)。为了应对RNN的"遗忘问题",LSTM采取的策略是(核心思想)建立一些门函数,其中一个门用来从单元中输出条目,我们将其称为输出门(output gate,Γo)。 另外一个门用来决定何时将数据读入单元,我们将其称为输入门/更新门(input/update gate,Γu/Γi)。 我们还需要一种机制来重置单元的内容,由遗忘门(forget gate, Γf ) 来管理。
c~<t>=tanh(wc[a<t−1>,x<t>]+bc)Γi=σ(wi[a<t−1>,x<t>]+bu)Γf=σ(wf[a<t−1>,x<t>]+bf)Γo=σ(wo[a<t−1>,x<t>]+bo)c<t>=Γi×c~<t>+Γf×c<t−1>a<t>=Γo×tanh(c<t>)
6. LSTM中的BPTT:
基于a<t>, 可以得到每一步的预测值:
y^<t>=g(wya<t>+by)
单步损失$\mathcal{L}^{}(\hat{y}^{}, y^{}) $略去,(与上文的传统RNN一样),模型总损失为:
L(y^,y)=T1t=1∑TyL<t>(y^<t>,y<t>)
优化目标为:
J=wc,wf,wi,wo,wy,bc,bf,bi,bo,byargminL(y^,y)
为了便于讨论,依然忽略偏置值对模型的影响,着重考虑权重矩阵。
首先是损失函数关于wf的导数
∂wf∂L=i=1∑t∂wf<i>∂L<i>∂wf<t>∂L<t>=∂y<t>∂L<t>∂a<t>∂y<t>∂c<t>∂a<t>∂Γf<t>∂c<t>∂wf<t>∂Γf<t>
公式之所以会分为五项,是因为在反向传播过程中存在两个“分岔路口”。,再往下求解之前一个时刻,则公式内部的∂c<t>∂a<t>继续展开为五项。
求解wi的影响的思路和wf类似,同样存在五项;求解前一时刻的wo,wc的影响则会分别出现4条链路(4项)。对于wy的影响的求解就较为简单,因为不需要之前时刻的信息。
LSTM的时序记忆能力强的原因?
LSTM的核心是前向传播中的记忆单元,通过模型学习,调节三个门函数的权重矩阵的值,有可能会产生∂c<t−1>∂c<t>≈1,从而有
i=k∏t∂c<i−1>∂c<i>≈1
因为有记忆单元的存在,LSTM能实现在较长的时间内“记住”之前的信息。
LSTM对BPTT的梯度爆炸和梯度消失的缓解
LSTM对梯度消失的缓解依然是在更新记忆单元。反向传播的过程中涉及计算∂c<t−1>∂c<t>,将其展开能够得到:
∂Γf<t>∂c<t>∂a<t−1>∂Γf<t>∂c<t−1>∂a<t−1>+∂Γi<t>∂c<t>∂a<t−1>∂Γi<t>∂c<t−1>∂a<t−1>+∂c~<t>∂c<t>∂a<t−1>∂c~<t>∂c<t−1>∂a<t−1>+∂c<t−1>∂c<t>
=c<t−1>σ′(wxfx<t>+wafa<t−1>+bf)Γotanh′(C(k−1))+c~<t>σ′(wxix<t>+waia<t−1>+bi)Γotanh′(C(k−1))+Γi<t>tanh′(waca<t−1>+wxcx<t>+bc)tanh′(C(k−1))+f(t)
k=t+1∏T∂c<k−1>∂c<k>=(f(k)f(k+1)…f(T))+other
在LSTM迭代过程中,针对 ∏k=t+1T∂c<k−1>∂c<k>而言,模型在学习的过程中,有了三个门函数的权重矩阵,每一步可以通过更改权重矩阵去自主选择在[0,1]之间,或者大于1,整体∏k=t+1T∂c<k−1>∂c<k>也就不会一直减小,远距离梯度不至于完全消失,也就能够解决RNN中存在的梯度消失问题。
LSTM和ResNet中的残差逼近思想有些相似,通过构建从前一时刻记忆单元到下一时刻记忆单元的“短路连接”,使梯度得已有效地反向传播,以应对梯度消失。
至于梯度爆炸问题,LSTM的提出不能说完全规避,从RNN的单项式连乘到LSTM的多项式连乘,后者还有相加运算,有可能梯度值大于1。毕竟LSTM的提出主要是为了缓解梯度消失的问题。