
最新Tricks for DeepSNN Learning
写在前面
这是可以说的吗🫣🫣🫣
Efficient Training
调超参的时候可以先试试用Imagenet的100类试试,调的差不多了再上全部。
SNN Transformer Training
Transformer的常用Base lr是1e-4,adamw下是1e-4到6e-4之间,lamb可能需要再精调。adamw的前期收敛性太强了建议学习率linear warmup,用log怕炸
C-Optim
stdconv -> adaptive_clip clip_grad=0.02
正常的linear就torch自带的clip clip_grad=1 or 5
FasterViT?
Spike-driven Transformer V2/V3
检测与分割:除了backbone都是整数不norm
卷积算子貌似和整数(不带norm)很适配、attention貌似很和小数(带norm)适配
Spike-driven Transformer V1
About Finetuning SDT-V1 (Contributed by Qian S., 2025-04-28)
v1没有提 ...
DeepGEMM-Beginner
写在前面
没错 这是一个新坑
为什么要做DeepGEMM的探索
某位师兄的MoE训练成本太高了,不得不借鉴Deepseek的FP8训练策略。于是我就来研究DeepGEMM了…
使用的算力平台
某超算中心(H20 Slrum)
环境配置
翻阅DeepGEMM的Github, 官方给出了所需的运行环境:
1234567Requirements- Hopper architecture GPUs, sm_90a must be supported- Python 3.8 or above- CUDA 12.3 or above- But we highly recommend 12.8 or above for the best performance- PyTorch 2.1 or above- CUTLASS 3.6 or above (could be cloned by Git submodule)
除了CUTLASS,其他的模块在超算中心中的modulelist中都能找到,这里我使用的配置是:
gcc_compiler10.3.0 cuda-12.4 cmake-3.24.0rc4 ...
My First Step in Bioinformatics
Refs
scPROTEIN(single-cell PROTeomics EmbeddINg): A Versatile Deep Graph Contrastive Learning Framework for Single-cell Proteomics Embedding [Github Link]
CLIP系列论文
Refs
Github Repo: jacobmarks:awesome-clip-papers
1. 经典中的经典:CLIP本尊
Title: Learning Transferable Visual Models From Natural Language Supervision
CLIP的核心工作是Contrastive Language–Image Pre-training,即对比语言-图像预训练,联合训练一个图像编码器和一个文本编码器来预测一批(图像,文本)训练样本的正确配对
123456789101112131415161718192021222324# image_encoder - ResNet or Vision Transformer# text_encoder - CBOW or Text Transformer# I[n, h, w, c] - minibatch of aligned images# T[n, l] - minibatch of aligned texts# W_i[d_i, d_e] - learned proj of i ...
Minkowski-Engine
Ref
Minkowski Engine Document
official code of “OpenShape: Scaling Up 3D Shape Representation Towards Open-World Understanding”
定义与专业术语 Definitions and Terminology
下面介绍Minkowski Engine中的关于稀疏卷积的定义与专业术语。(基本都是汉化搬运Ref.1,力图加上我的一点个人理解)
稀疏张量 Sparse Tensor
首先引入稀疏矩阵:是一个零元素占整个矩阵元素的绝大多数的矩阵。而稀疏张量是稀疏矩阵的维度扩展,其中非零元素用索引 Indices(记为C\mathcal{C}C)和与其对应的值 Values/Features(记为F\mathcal{F}F)。
Indices作为稀疏张量非零元素的位置表示,Values则是这个元素本身的值。
在实际应用中,我们用**坐标列表 COOrdinate list (COO)**的格式对稀疏张量进行存储。这种存储策略本质上是将稀疏张量中的非零元素坐标拼接(co ...
FilterNet
Ref
{ % FilterNet_2411.01623v2.pdf % }
Motivation
解决的问题:神经网络对于时序预测的不准确性(Timeseries forecasting)
点名批评 iTransformer
主要贡献:
在研究基于深度Transformer的时间序列预测模型时,通过一个简单的模拟实验,研究者们观察到了一个有趣的现象,这激发了他们探索一种新的角度,即将信号处理技术应用于深度时间序列预测。
受到信号处理中滤波过程的启发,研究者们提出了一个简单而有效的网络——FilterNet。这个网络基于两个可学习的频率滤波器构建,这些滤波器能够通过选择性地通过或衰减时间序列信号的某些成分来提取关键的信息性时间模式,从而提高预测性能。
研究者们在八个时间序列预测基准数据集上进行了广泛的实验。实验结果表明,与现有的最先进的预测算法相比,他们的模型在有效性和效率方面都取得了更优越的性能。
Methods
网络架构
输入的时间序列数据(LLL为观测时间窗长度,NNN为变量个数),表示为
X=[X11:L,X21:L,…,XN1:L]\bf X=[{X}_{1 ...
Explainable neuromorphic computing
Ref.
Visual explanations from spiking neural networks using inter‑spike intervals
Main Contents
本文提出脉冲激活图(Spike Activation Map, SAM), 无需反向传播或依赖梯度即可获得“视觉解释”. 这与Grad-CAM不同(通过反向传播计算梯度来量化浅层到深层神经元对目标类别预测的贡献)
我们利用了这样一种生物学观察:短脉冲间隔(ISI)的脉冲在神经系统中包含更多信息,因为这些脉冲更可能通过提高神经元的膜电位来引发突触后脉冲。针对SNN所做出的预测,SAM为网络中的每个神经元计算一个神经元贡献分数(Neuronal Contribution Score, NCS)。NCS分数定义为先前脉冲的时间脉冲贡献分数(Temporal Spike Contribution Score, TSCS)的总和,并使用指数核函数计算。
对于在短时间窗口内多次脉冲的神经元,TSCS较高;相反,对于在较长时间内发放脉冲的神经元,TSCS较低。
Results Comparison
SN ...
ANN2SNN Principles
Ref.
Zihan Huang, Xinyu Shi, Zecheng Hao, Tong Bu, Jianhao Ding, Zhaofei Yu, and Tiejun Huang. 2024. Towards High-performance Spiking Transformers from ANN to SNN Conversion. In Proceedings of the 32nd ACM International Conference on Multimedia (MM '24). Association for Computing Machinery, New York, NY, USA, 10688–10697. https://doi.org/10.1145/3664647.3680620

计算神经科学中的高效编码机制探究
Refs
Energy-Efficient Neuronal Computation via Quantal Synaptic Failures, William B. Levy and Robert A. Baxter; The Journal of Neuroscience, June 1, 2002, 22(11)
Another contribution by synaptic failures to energy e cient processing by neurons, Joanna Tyrcha;∗, William B. Levy; Neurocomputing 58–60 (2004) 59–66
Quantal Synaptic Failures
主要参考Ref.1.
Prior Knowledge 1: Basic Mathematical Modeling of Neurons, a information theory perspective.
🍭Perspective 1: 树突体求和 等价于 香农信道。
随机的突触信号传递过程被视作树突体求 ...
毕业设计(三)文献调研:MINT-SNN
Abstract
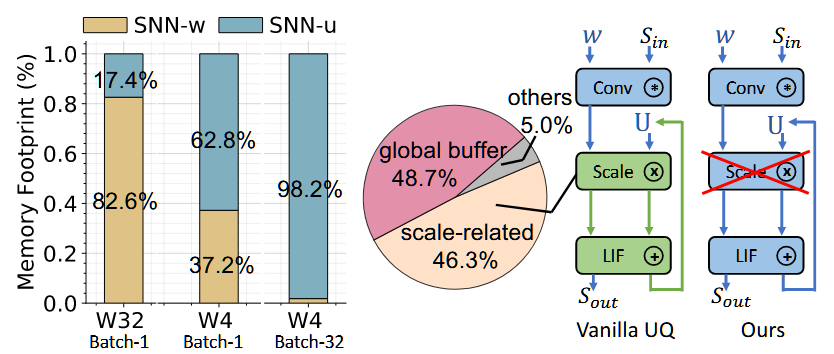
本文创新点:
将存储密集型的膜电位量化到了极低2bit精度。
在权重和膜电位数据的均匀量化中共享缩放因子。
效果:2-bit的VGG-SNN-16:90.6%(CIFAR10),memory footprint减少93.8%,computational energy减少90%。
Introduction